 Учебное пособие для самостоятельного изучения студентами Челябинск Издательство юургу 2002 (075) - umotnas.ru o_O
Учебное пособие для самостоятельного изучения студентами Челябинск Издательство юургу 2002 (075) - umotnas.ru o_O
Учебное пособие для самостоятельного изучения студентами Челябинск Издательство юургу 2002 (075) - umotnas.ru o_O
Учебное пособие для самостоятельного изучения студентами Челябинск Издательство юургу 2002 (075) - umotnas.ru o_O
|
страница 1страница 2страница 3страница 4
|
|||||||||||||||||||||||||||||||||||||||||||
|
Похожие работы
|
Учебное пособие для самостоятельного изучения студентами Челябинск Издательство юургу - страница №1/4

Министерство образования Российской Федерации Южно-Уральский государственный университет Филиал в г. Златоусте Кафедра технической механики 531(07) К142А. И. Казанцева ТЕОРЕТИЧЕСКАЯ МЕХАНИКАЧасть 6 КИНЕТОСТАТИКА И АНАЛИТИЧЕСКАЯ МЕХАНИКАУчебное пособие для самостоятельного изучения студентами Челябинск Издательство ЮУрГУ 2002 УДК 531(075) Казанцева А.И. Теоретическая механика: В 6 частях. Часть 6. Кинетостатика и аналитическая механика: Учебное пособие для самостоятельного изучения студентами. — Челябинск: Изд-во ЮУрГУ, 2002. — 83 с. Учебное пособие предназачено для самостоятельного изучения разделов теоретической механики «Кинетостатика», «Аналитическая механика». Пособие состоит из теоретической и практической частей. В разделе «Ответы и решения» даны примеры решения задач и анализ типичных ошибок, допускаемых студентами при их решении. Пособие предназначено для студентов всех технических специальностей. Ил. 166, список лит. — 4 назв. Одобрено учебно-методической комиссией филиала ЮУрГУ в г. Златоусте. Рецензенты: В.С. Карманов, © Издательство ЮУрГУ, 2002. ВВЕДЕНИЕПрограммированное обучение базируется на достижениях кибернетики как науки об общих закономерностях процессов передачи информации и управления ею. Программированное обучение представляет собой совокупность методов и средств оптимизации массового обучения на основе последовательного осуществления принципа программированного управления. Главная задача высшей школы — повышения качества обучения, поэтому кафедра технической механики ЗФ ЮУРГУ рассматривает программированное обучение, прежде всего как систему управляемой самостоятельной работы студентов. Основные требования к такой системе
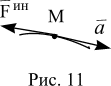
КИНЕТОСТАТИКАРаздел «Кинетостатика» рассчитан на 6 ч самостоятельной работы студентов. После его изучения студент должен знать: а) понятие силы инерции точки; б) формулировку принципа Даламбера для точки и системы точек; в) сущность метода кинетостатики; г) приведение сил инерции к простейшему виду; д) определение динамических реакций; е) уравновешивание сил инерции на практике, уметь: а) определять величину и направление силы инерции точки; б) составлять величину и направление главного вектора и главного момента сил инерции; в) определять динамические реакции, помнить: а) формулы для вычисления силы инерции точки; б) формулы для вычисления главного вектора и главного момента сил инерции; в) как пишется принцип Даламбера в векторной и скалярной формах (уравнение фиктивного равновесия); г) к какому простейшему виду приводятся силы инерции точек тела при поступательном, вращательном и плоскопараллельном движениях тела; д) порядок решения задач методом кинетостатики. Тема 1. СИЛЫ ИНЕРЦИИПонятие силы инерции в прямолинейном и криволинейном движенииПусть материальная точка М массой m движется с ускорением  . (1) . (1)
Из формулы (1) следует, что сила инерции материальной точки:
П ример. Представим себе рабочего, который катит перед собой вагонетку по горизонтальным рельсам, сообщая ей ускорение  . Чтобы сообщить вагонетке это ускорение, рабочий должен толкать ее с силой . Чтобы сообщить вагонетке это ускорение, рабочий должен толкать ее с силой  . По 3-му закону динамики вагонетка действует на руки рабочего с силой . По 3-му закону динамики вагонетка действует на руки рабочего с силой  , которая является силой инерции вагонетки. При равнопеременном движении вагонетки ( , которая является силой инерции вагонетки. При равнопеременном движении вагонетки ( = 0; = 0) рабочий не испытывает противодействия вагонетки. = 0; = 0) рабочий не испытывает противодействия вагонетки.
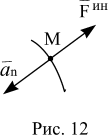
Если точка М движется по кривой, то ускорение ее раскладывается на два ускорения:  ; ;  ; ; (2) ; ; (2) . (3) . (3)
Формулы (2) определяют проекции силы инерции на естественные оси. Определим проекции силы инерции на неподвижные декартовы оси координат (рис. 3). Обозначим их через , Пусть ; Тогда . (5) Принцип Даламбера для точкиСформулирован Даламбером в 1743 г. Принцип лежит в основе метода кинетостатики, позволяющего задачи динамики формально сводить к задачам статики. Рассмотрим движение несвободной материальной точки М (рис. 4). Уравнение ее движения Равенство (6) выражает принцип Даламбера в векторной форме: в любой момент времени действующие на точку активную силу и реакцию связи можно мысленно уравновесить силой инерции этой точки. Итак, если приложить силу инерции к самой точке, то последнюю можно считать условно (мысленно, на самом деле она движется с ускорением Определить реакцию стержня, если вся система вращается вокруг оси О с угловой скоростью . Длина ОМ равна l, вес точки P, Но Так как то . Итак: 1) в покое ; 2) в движении За счет действия силы инерции реакция связи увеличилась. Силы инерции достигают большой величины (так как пропорциональна Принцип Даламбера для системыВ применении к отдельной материальной точке принцип Даламбера запишется: геометрически (8) При рассмотрении движения отдельной материальной точки принцип Даламбера не имеет существенных преимуществ перед обычными дифференциальными уравнениями, которые обнаруживаются при изучении движения системы материальных точек. Пусть имеем движущуюся систему материальных точек. На каждую точку Эти уравнения и выражают принцип Даламбера для системы: в любой момент времени действующие на систему внешние и внутренние силы можно мысленно уравновесить силами инерций точек системы. Но уравнения системы (9), хотя и выражают необходимые и достаточные условия равновесия системы, лишь в очень редких случаях приводят к окончательному решению задачи, так как в них входят внутренние силы, которые обычно неизвестны. Постараемся исключить внутренние силы. Сложим все внешние, внутренние силы и силы инерции всех точек системы: Но по свойству внутренних сил и , тогда Равенства (10) и (11) являются следствиями принципа Даламбера для системы. Они уже не содержат внутренних сил. Спроектируем равенства (10) и (11) на неподвижные оси. Получим 6 уравнений:  (12) (12)
Система (12) представляет уравнения фиктивного или динамического равновесия системы. Если все силы лежат в одной плоскости, то имеем 3 уравнения динамического равновесия: где lj = OAj. Чтобы отыскать неизвестную реакцию , составим сумму моментов всех сил внешних и сил инерций относительно точки O: тогда . Контрольные вопросы и задания к теме 1№1 К чему приложена сила инерции материальной точки в общем случае, если точка находится под воздействием одного тела?
№2 Как направлена сила инерции материальной точки?
№3 К №4 Т №5 Чему равна сила инерции материальной точки? 1. . 2. . 3. ; где . 4. . Выберете неверный ответ. При каком из указанных движений нормальная сила инерции равна нулю
№7 Вес лифта с пассажиром 8 000 Н. С каким ускорением движется лифт. Если при этом натяжение троса, поддерживающего лифт, равно 12 000 Н? 1. м/с2. 2. 3. С При какой скорости вращения произойдет разрушение проволоки, если она может выдержать силу 2 200 Н? Длина проволоки 1. с–1. 2. 3. . №9 Самолет с реактивным двигателем летит со скоростью 900 км/ч. Считая, что человек может переносить пятикратное увеличение веса, найти, какой наименьший радиус кривизны можно допустить при вираже в вертикальной плоскости, если вес летчика P ( м/с2). 1. = 1 041,6 м. 2. = 6,25 м. 3. = 1 562,5м. Стальная проволока выдерживает натяжение до 450 Н. С каким наибольшим ускорением можно поднимать груз в 400 Н, подвешенный на этой проволоке, чтобы она не разорвалась? 1. м/с2. 2. 3.
№11 М атериальная точка А весом удерживается в вертикальной плоскости двумя нитями ОА и АВ (рис. 15). Определить натяжение нити ОА до обрезания горизонтальной нити АВ, а также в момент, когда эта нить только что обрезана. Нить ОА считать нерастяжимой. 1. 2. 3. 4. О 1. 2. 3. |
|
|
 (рис. 2). Сила инерции точки тоже раскладывается на
(рис. 2). Сила инерции точки тоже раскладывается на  и
и  ; , где — касательная сила инерции;
; , где — касательная сила инерции;  — нормальная сила инерции; так как ; ;
— нормальная сила инерции; так как ; ; ,
,  ;
;  ;
;  .
. .
. (4)
(4) , где
, где  — активная сила; — реакция связи. Перенесем в одну часть с силами
— активная сила; — реакция связи. Перенесем в одну часть с силами  , тогда
, тогда . Точка в покое (рис. 5), в движении (рис. 6).
. Точка в покое (рис. 5), в движении (рис. 6).  ;
;  .
. или
или  .
. ,
, ;
;  ; .
; . ) и могут принести значительный вред. Они увеличивают реакции связей, а значит давление на опоры. При больших скоростях силы инерции достигают громадной величины и не учитывать их нельзя. Таким образом, силы инерции (формальные для точки) реально существуют в природе, и приложены они в действительности к связям.
) и могут принести значительный вред. Они увеличивают реакции связей, а значит давление на опоры. При больших скоростях силы инерции достигают громадной величины и не учитывать их нельзя. Таким образом, силы инерции (формальные для точки) реально существуют в природе, и приложены они в действительности к связям. , аналитически
, аналитически системы действует внутренняя
системы действует внутренняя  сила и внешняя . Запишем для точки
сила и внешняя . Запишем для точки  , представив равнодействующую силу, приложенную к
, представив равнодействующую силу, приложенную к  , разложенной не на активную и реакцию связи, а на внутреннюю и внешнюю силы. Но j = 1, 2, … n получим систему n уравнений фиктивного или динамического равновесия системы:
, разложенной не на активную и реакцию связи, а на внутреннюю и внешнюю силы. Но j = 1, 2, … n получим систему n уравнений фиктивного или динамического равновесия системы: . Умножив на
. Умножив на  радиус-вектор
радиус-вектор  ; (10)
; (10)
 . (6)
. (6) прикреплен шарниром А к вертикальному валу, вращающемуся с угловой скоростью
прикреплен шарниром А к вертикальному валу, вращающемуся с угловой скоростью  . Все эти силы можно мысленно уравновесить силами инерций всех точек стержня. Разобьем стержень на отдельные точки. Сила инерции точки
. Все эти силы можно мысленно уравновесить силами инерций всех точек стержня. Разобьем стержень на отдельные точки. Сила инерции точки  ,
,
 ?
? .
. .
. м/с2.
м/с2. м/с2.
м/с2.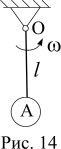 тальная проволока ОА равномерно вращается вокруг горизонтальной оси, перпендикулярной к плоскости чертежа в точке О, несет на конце А груз 20 Н (рис. 14).
тальная проволока ОА равномерно вращается вокруг горизонтальной оси, перпендикулярной к плоскости чертежа в точке О, несет на конце А груз 20 Н (рис. 14). см.
см. с–1.
с–1. м/с2.
м/с2. м/с2.
м/с2. ;
;  ;
;  .
. .
. в стержне ВС поршня, когда кривошип ОА находится в горизонтальном “правом” положении, вес поршня
в стержне ВС поршня, когда кривошип ОА находится в горизонтальном “правом” положении, вес поршня  , ,
, ,  ,
,  (рис. 16).
(рис. 16). .
. .
. .
.